
개요
단일 빔 트럭은 산업 분야에서 일반적으로 사용되는 장비로, 3차원 공간에서 물품의 이동을 실현하는 데 사용됩니다. 그 중, 수평면의 두 방향의 작동은 대형, 자동차에 의해 완료되며, 작동의 수직 방향은 전기 호이스트 메커니즘의 리프팅을 담당하고, 전기 호이스트는 2단 원추형 모터이며, 전기 제어 모드는 기본적으로 AC 접촉기 직접 시동이며 충격 전류가 너무 커서 모터 및 부품이 손상되기 쉽고 기계 장비 수명이 단축되며 유지 보수 금액이 상대적으로 큽니다. 그리고 속도 조절 특성이 좋지 않고 디버깅이 충분히 원활하지 않습니다.
전기 호이스트 작동의 특징
크레인은 시동 토크가 크며 일반적으로 정격 토크의 150% 이상입니다. 과부하 및 기타 요인을 고려할 경우 시동 가속 과정에서 정격 토크의 최소 200%가 제공되어야 합니다.
리프팅 메커니즘이 작동 중지되면 모터는 회생 전력 생성 상태가 되며 에너지 소비 제동 또는 그리드에 대한 회생 피드백을 받아야 합니다.
리프팅 기구의 하중은 리프팅 중량이 떨어지거나 지면에 닿을 때 급격하게 변화하며, 인버터는 충격 하중을 원활하게 제어할 수 있어야 합니다.
KD600 인버터 특징
- 자기장 지향 전류 개방 루프 벡터 제어, 모터 변수는 저주파 토크, 빠른 응답 속도 및 기타 특성과 함께 완전히 분리됩니다.
- KD600은 PG 없는 개방 루프 벡터 제어 모드와 벡터화된 V/F 모드를 채택하여 한 단계의 전력 레벨을 확대합니다.
- 주파수 범위: 0.5-600Hz 단계 설정, 무단계 연속 조정;
- 작동 전압 범위: 380V±20%, 순간적으로 버스 전압이 360VDC만큼 낮아 문제 없이 작동됩니다.
- 과부하 용량: 정격 전류 150%, 1분간 허용; 200% 정격 전류, 1초 허용;
- 토크 특성: 시동 토크, 정격 토크의 2배 이상; 저주파 토크, 정격 토크의 1.6배보다 큰 1Hz; 제동 토크가 정격 토크보다 큽니다.
간단한 배선도
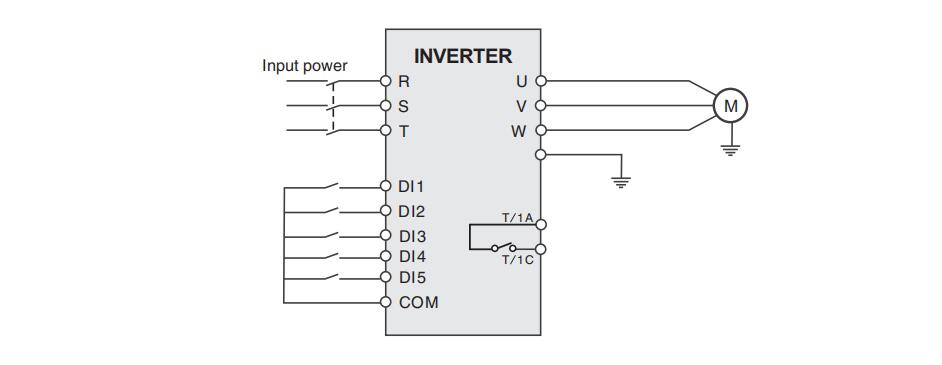
기준파라미터 설정 및 설명은 다음과 같습니다.
| 기능 코드 | 값 설정 | 지침 | 주목 |
| P0-03 | 1 | 벡터 모드 | |
| P0-04 | 1 | 터미널 제어 | |
| P0-06 | 4 | 다중 속도 주파수 | |
| P0-23 | 3 | 가속 시간 | |
| P0-25 | 5 | 감속 시간 | |
| P6-00 | 32 | 브레이크 제어 | |
| B5-00 | 1 | 브레이크 활성화 | |
| B5-01 | 2.5 | 브레이크 주파수 해제 | |
| B5-04 | 1.5 | 브레이크 주파수 | |
| P4-01 | 모터 파워 | ||
| P4-02 | 모터 전압 | ||
| P4-04 | 모터 정격 전류 | ||
| P4-05 | 모터 정격 주파수 | ||
| P4-06 | 모터 속도 | ||
| P5-00 | 1 | 앞으로 | |
| P5-01 | 2 | 뒤집다 | |
| P5-02 | 12 | 다중 속도 1 | 저속 |
| P5-03 | 13 | 다중 속도 2 | 중간 속도 |
| P5-04 | 14 | 다중 속도 3 | 고속 |
| PC-01 | 저속 주파수 | ||
| PC-02 | 중간 속도 주파수 | ||
| PC-04 | 고속 주파수 |
운영효과 분석
구동 시스템의 KD 시리즈 인버터 변환 변환, 변환 효과는 주로 다음과 같은 경우에 이상적입니다.
- 시동 시 소프트 스타트와 소프트 스톱이 실현되어 전력망에 미치는 영향을 줄입니다.
- 원래의 교대 접촉기와 속도 저항을 제거하기 위해 주파수 변환기를 사용합니다. 즉, 유지 관리 비용을 절약할 뿐만 아니라 가동 중지 시간 유지 관리 시간을 줄여 출력을 향상시킵니다.
- 5Hz~30Hz에서 작동하는 메인 후크는 매우 분명한 효과를 가질 수 있습니다.
- 현장 프로세스를 개선하고 원자재를 절약합니다.
마무리 발언
전면 및 후면 이동을 제어하는 주파수 변환기와 왼쪽 및 오른쪽 이동 메커니즘 시리즈를 사용하면 과주파수 작동을 달성할 수 있어 작업 효율성을 크게 향상시키는 동시에 안전을 보장하고 빈번한 AC 교체로 인한 유지 관리 작업량을 줄일 수 있습니다. 운전 장비의 접촉기.
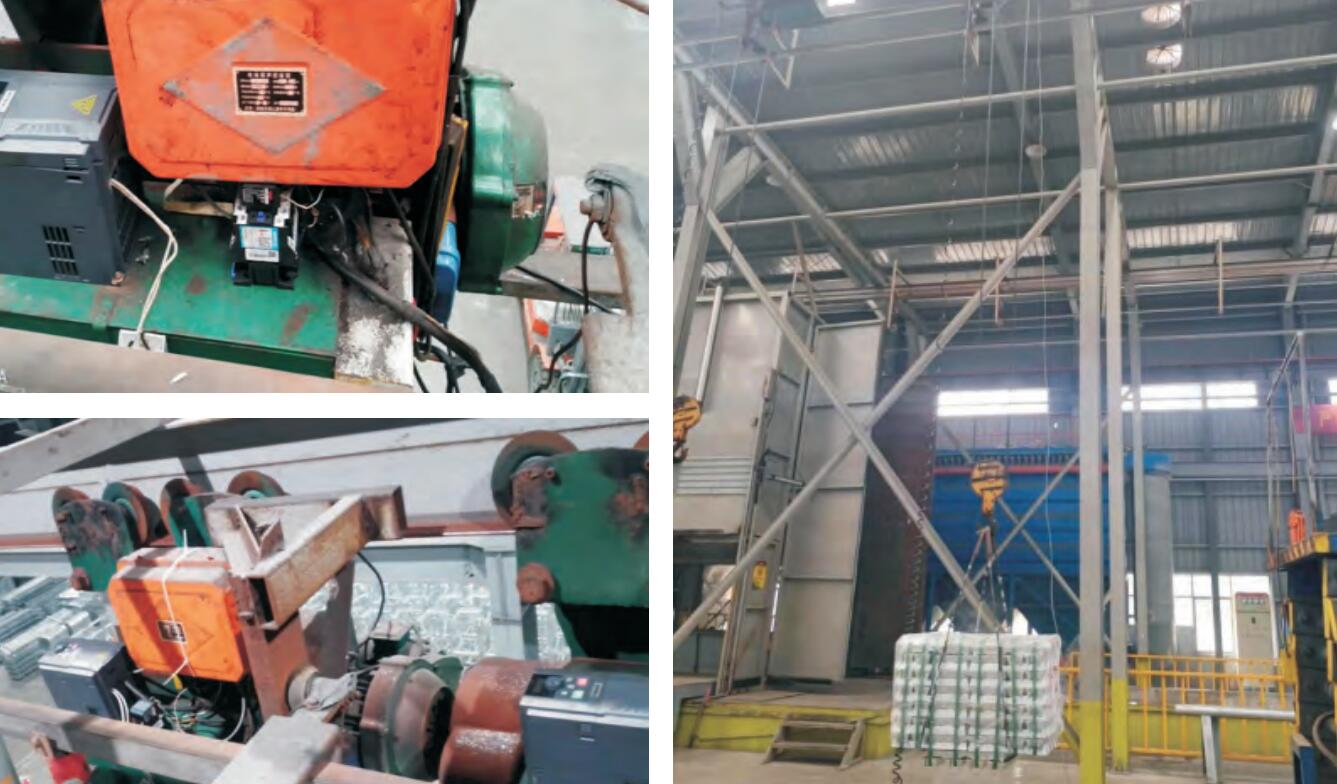
신청사이트
게시 시간: 2023년 11월 17일